Engineers at the University of Houston have recently developed a new way to produce electronic artificial skin that allows a robot to sense differences between hot and cold.
Published in Science Advances, the study delineates a method of producing stretchable electronics.
This technology incorporates stretchable circuits devices and embeds them onto a flexible material.
The electronic materials typically consist of semiconductors, a solid element or compound that operates as a good medium for the control of electric current.
Semiconductors can either be carbon-based (organic) or non-carbon based (inorganic).
However, neither type of semiconductor can be “stretched.” In the past, engineers have built structures to relieve some of the strain caused by attempting to stretch stiff materials. It’s also possible to use inherently stretchable materials, which are cost-efficient but aren’t semi-conductors.
In the paper, the researchers, led by Cunjiang Yu, a Bill D. Cook assistant professor of mechanical engineering at the University of Houston, proposed using a new type of stretchable semiconductor, P3HT nanofibril percolated polydimethylsiloxane rubber composite (P3HT-NF/PDMS).
“The work is the first semiconductor in rubber composite format that enables stretchability without any special mechanical structure,” Yu said according to ScienceDaily.
The team began by combining gold nanowires with silver-coated nanowires to create a stretchable conductor.
They used scanning electron microscopy to ensure that the fusion had taken place between the two wires. After confirming that it worked, they tested how stretchy the filaments were. They also looked at how the electrical charge changed when the filaments werplaced under mechanical strain.
The nanowires were then placed in a solution of a silicon-based polymer known as polydimethylsiloxane (PDM) which hardened into material capable of transporting electric current.
When the team stretched out this new material, P3HT-NF/PDMS, up to one and a half times its size, not only did the nanowires not break but the material also retained its electric conductivity.
After forming their new material, the team tested mechanical strain, pressure and temperature. They applied a sensor to a film of P3HT-NF/PDMS and then measured the electrical resistance. Resistance is the opposition that a substance offers to the flow of electric current.
They found that as the strain increased, as they stretched the film out, the resistance increased. The team found that if they strained the film along its length, the resistance increased by nearly 20 times than before the film was strained. If, however, they strained the film perpendicularly, the resistance only doubled.
Using their observations of the change in resistance, Yu and his team calculated the gauge factor (GF), which is the ratio of the change in resistance to the extent of mechanical stretching. When the film was stretched up to one and a half times its size, the GF was calculated as 33. The GF of metal foil is typically between two and five.
To look at how pressure affected the resistance, the team applied different amounts of pressure to the film. They found that when the pressure doubled, the relative resistance nearly tripled. The results indicate that P3HT-NF/PDMS acts as a viable pressure sensor.
Additionally when they added a temperature sensor, they found that the relative resistance decreased from 1.0 to 0.67 with an increase in temperature from 30 degrees to 50 degrees Celsius, making the film a viable temperature sensor as well.
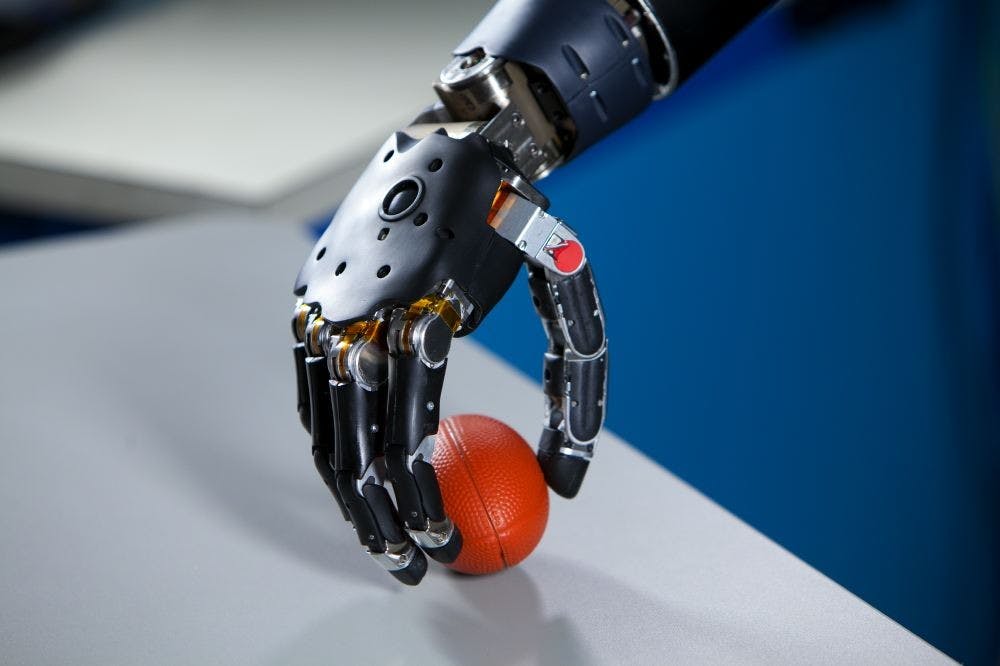
Due to the flexibility of P3HT-NF/PDMS and its demonstrated ability to retain electric properties, the team implemented the new material as an artificial skin for robot hands. The temperature and pressure sensors were placed on its fingers, which gave the robot the ability to interpret hand gestures and to sense temperature changes.
The strain sensors used resistance to translate hand gestures, enabling the robot to use sign language. The team calibrated the resistance calculated by the strain sensors for each letter of the sign language alphabet. Using 14 strain sensors on its joints, the robot could translate motion into letters.
To test the robot’s ability to sense temperature changes, the team alternatively placed a cup of hot water and a cup of ice water next to the robot hand. Yu and the other engineers found that it took 80 seconds for the robot to register hot temperatures and 50 seconds for the robot to register cold temperatures.
The scientists suggested further optimizing the ability of the robot hand to tell the difference between temperatures in the future.
The engineers hope to apply their discovery of a soft, bendable and stretchable material to other ways to use wearable electronics, including health monitors, medical implants and surgical gloves.